
- 1. Montage Lego
- 2. Installation du système MicroPython
- 3. Branchement du servomoteur
- 4. premier test
- 5. Premier programme
- 6. Création d'un petit scénario
Deux choix s'offre à nous :
- premièrement, l'utilisation du MicroPython, choix privilégié par la fondation Raspberry,
- deuxièmement, l'utilisation du CircuitPython, fork de la société Adafruit.
Dans ce premier tuto, nous utiliserons MicroPython.
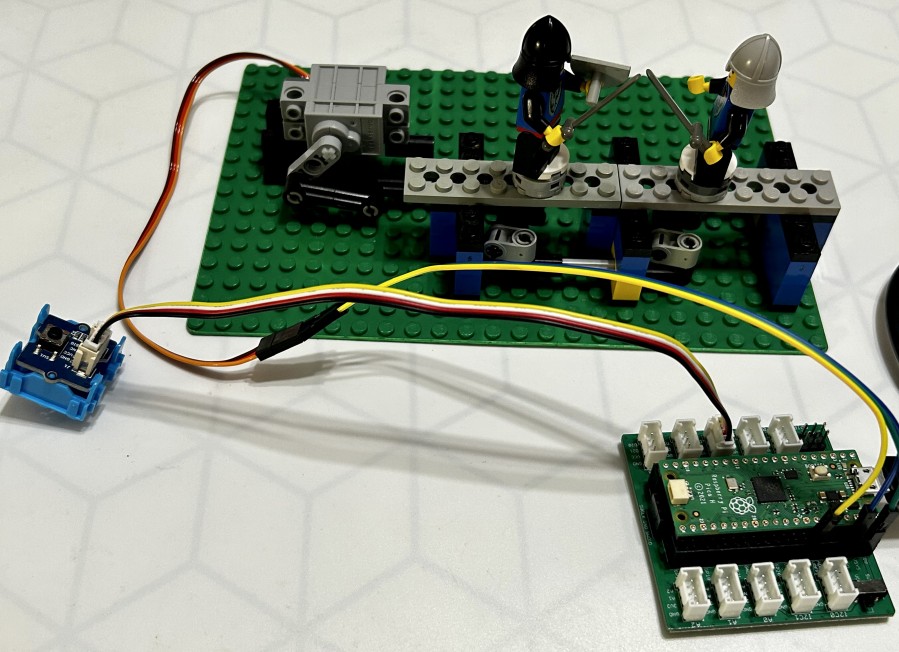
1. Montage Lego
Nous utiliserons le mécanisme du précédent tuto avec l'Arduino. Mais avant de se lancer dans ce projet, nous allons voir les deux solutions que j'ai réalisé sur le montage Lego précédent. En fonction de la position zéro degré du servo, il faudra utiliser soit le bras composé de deux Axle and Pin Connector Angled (ref 32013) et d'un Axle 2L Notched (ref 32062), soit le montage par un Liftarm Thick 1 x 3 (ref 32523).

montage 1 - deux Axle and Pin Connector Angled

montage 2 - Liftarm Thick 1 x 3
2. Installation du système MicroPython
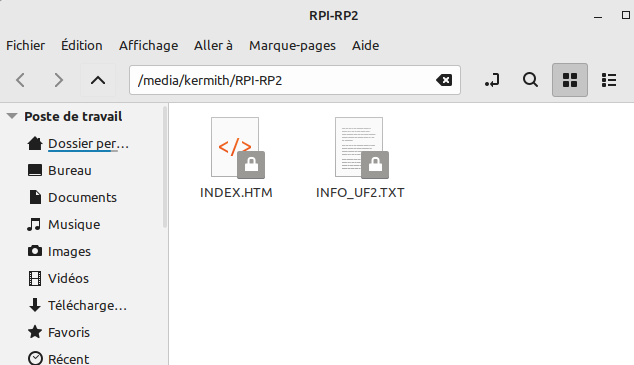
Lors de l'achat d'un Pi Pico, celui-ci est vendu sans système d'exploitation. Pour installer MicroPython, brancher le Pi Pico sur un port USB de votre ordinateur et appuyer en même temps sur le bouton BOOTSEL. Normalement une fenêtre s'affiche comme ci-dessous.
Lancez le programme Thonny et cliquez sur le menu en bas à droite
![]()
Choisissez Install MicroPython

Une boîte de dialogue s'affiche et choisissez le modèle de Pi Pico. Dans notre exemple, nous prenons le Pi Pico sans Wifi : le Raspberry Pi * Pico/Pico H version 1.21.0

Une fois le système, cliquez sur Close.

Pour vérifier le bon fonctionnement du Pi Pico, cliquez sur le bouton rouge qui va redémarrer le système.

En bas de la fenêtre console, vous devriez voir ce message :
MicroPython v1.21.0 on 2023-10-06; Raspberry Pi Pico with RP2040
Type "help()" for more information.
>>>
3. Branchement du servomoteur
Le branchement du servo est très simple. Le servo comporte trois fils :
- le fil marron correspond à la masse GND
- le fil rouge correspond au +5V
- le fil orange correspond au signal de commande.
Dans notre exemple, nous utiliserons le GP28, broche 34.

4. premier test
Il est possible de commander le servo sans une librairie spécialisée mais l'utilisation du servo ne sera pas simple.
Le servomoteur GeekServo permet une rotation de 0° à 270°. Il faudra modifier en conséquence la librairie servo.py en initialisant la variable max_angle à 270.
max_angle = 270
Nous avons besoin de contrôler l'angle de rotation du servo, nous utiliserons la librairie ci-dessous (le basckslash dans le code permet le retour à la ligne) :
from machine import Pin, PWM
class Servo:
__servo_pwm_freq = 50
__min_u16_duty = 1640 - 2 # offset for correction
__max_u16_duty = 7864 - 0 # offset for correction
min_angle = 0
max_angle = 180
current_angle = 0.001
def __init__(self, pin):
self.__initialise(pin)
def update_settings(self, servo_pwm_freq, min_u16_duty,
max_u16_duty, min_angle, max_angle, pin):
self.__servo_pwm_freq = servo_pwm_freq
self.__min_u16_duty = min_u16_duty
self.__max_u16_duty = max_u16_duty
self.min_angle = min_angle
self.max_angle = max_angle
self.__initialise(pin)
def move(self, angle):
# round to 2 decimal places, so we have a chance of
# reducing unwanted servo adjustments
angle = round(angle, 2)
# do we need to move?
if angle == self.current_angle:
return
self.current_angle = angle
# calculate the new duty cycle and move the motor
duty_u16 = self.__angle_to_u16_duty(angle)
self.__motor.duty_u16(duty_u16)
def __angle_to_u16_duty(self, angle):
return int((angle - self.min_angle) *
self.__angle_conversion_factor) + self.__min_u16_duty
def __initialise(self, pin):
self.current_angle = -0.001
self.__angle_conversion_factor = \
(self.__max_u16_duty - self.__min_u16_duty) \
/ (self.max_angle - self.min_angle)
self.__motor = PWM(Pin(pin))
self.__motor.freq(self.__servo_pwm_freq)
Sauvegardez la librairie dans le Pi Pico en nommant le fichier servo.py. Utilisez pour cela le logiciel Thonny.

Maintenant, nous pouvons passer au programme. Importons la classe Servo.
from servo import Servo
Initialisation de l'objet my_servo en l'attachant au GP28
my_servo = Servo(pin=28)
Avant de réaliser un programme, il sera judicieux de vérifier les angles de départ et de fin avec un des deux types de montage. Pour cela, il suffit d'ajouter la commande suivante. Pour ma part, j'ai choisi le montage 1 avec un angle de départ à 9° et de fin à 45°.
my_servo.move(10)
Il suffit de lancer le programme avec le bouton vert (Run current script) pour obtenir l'angle désiré du servomoteur.
5. Premier programme
Le but du programme sera de simuler un combat médiéval. Le combat sera déclenché par l'appui d'un bouton. Voici le cablage.

Info
Si vous utilisez le nouveau PI Pico 2, il sera obligatoire de rajouter une résistance de 10 Kohms entre le pin et la masse comme ci-dessous :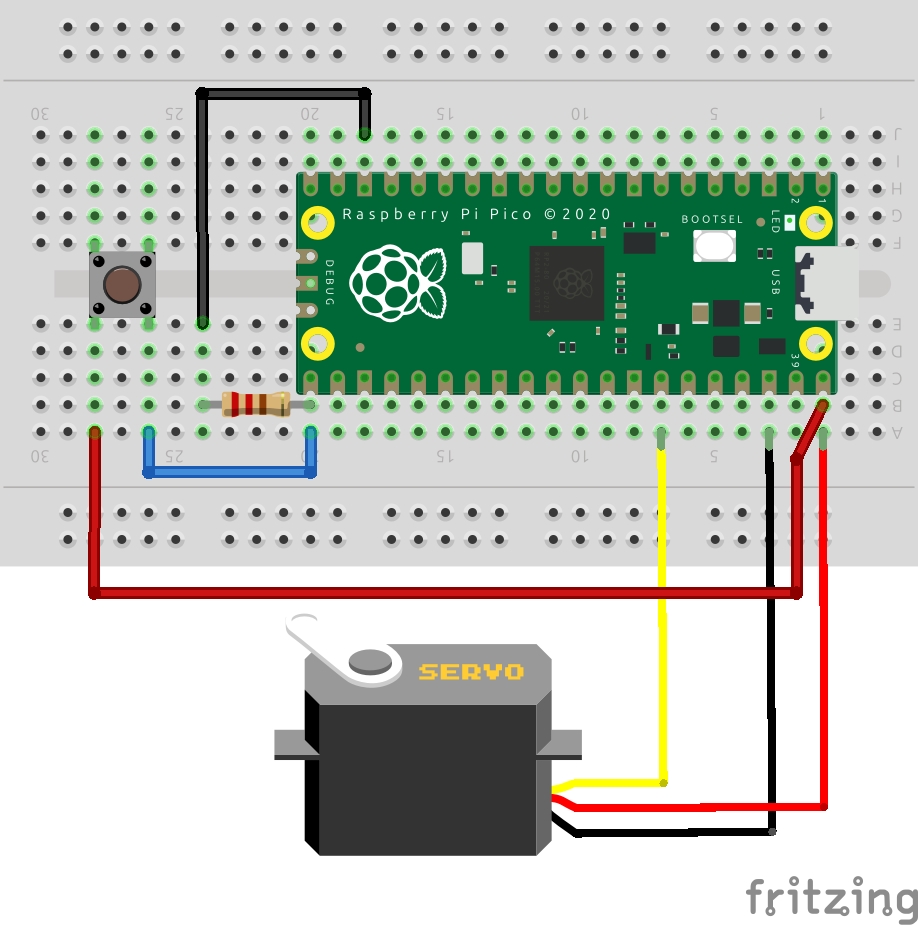
Maintenant, voyons le code.
import machine
from servo import Servo
my_servo = Servo(pin=28)
button = machine.Pin(16, machine.Pin.IN, machine.Pin.PULL_DOWN)
while True:
if button.value() == 1:
my_servo.move(45)
else:
my_servo.move(9)
Quand on appuie sur le bouton, le servo se déplacera à la position finale. Quand on relache le bouton, le servo reprend la position de départ. Pour le rendre permanent à chaque mise en route du Pi Pico, sauvegardez le programme dans le Pi Pico en le nommant main.py.

Petite démo
6. Création d'un petit scénario
Maintenant, nous allons créer un petit scénario. L'appui sur le bouton va permettre le combat pendant 10 mouvements avec une boucle for. Nous utiliserons un petit timer pour décomposer le mouvement. Voici le code :
import machine #importe la librairie du Pi Pico
import utime #importe la librairie mesurant le temps
from servo import Servo #importe la librairie gérant les servomoteurs
#initialisation de l'objet my_servo en l'attachant au GP28
my_servo = Servo(pin=28)
#initialisation de l'objet button en l'attachant au GP16
button = machine.Pin(16, machine.Pin.IN, machine.Pin.PULL_DOWN)
#boucle principale
while True:
if button.value() == 1:
# si le bouton est appuyé on lance une boucle (10 fois)
for i in range(10):
#déplacement du servomoteur vers la droite 45°
my_servo.move(45)
#délai d'une demi-seconde
utime.sleep(0.5)
#déplacement du servomoteur vers la gauche 9°
my_servo.move(9)
#délai d'une demi-seconde
utime.sleep(0.5)
et voici une petite démo
Comme vous avez pu le constater, j'utilise un shield grove pour Pi Pico. Celui-ci fera l'objet d'un prochain tuto.